ժҪ�������˻���GPS����ʱ�ӵĵ���ϵͳĸ�ߵ�ѹͬ����Dz�����ʵ�ַ������о��˵�ѹ��ǵĹ������������ɢFourier�͵ݹ�Fourier�㷨��̽���˱�������ʵ�ͬ�����������㷨������DSP���ݴ���оƬʵ���˻���DFT�㷨��GPSͬ����ѹ��Dz���װ�õ���Ӳ����ƣ�������ʵ���������
�ؼ��ʣ�ͬ����ѹ��� GPS ��������� DFT�㷨 ������ͬ������ DSPоƬ
1������
������ѹ�����ǵ���ϵͳ��һ����Ҫ����������ĸ�ߵ�ѹ����������״����ϵͳ���е���Ҫ״̬��������ϵͳ�ܷ��ȶ����еı�־֮һ��Ȼ����������������û��һ�����ԵIJο���ѹ��ǣ�����ϵͳ�и��ڵ��ѹ����Dz����ֱ�Ӳ�����������ͨ�ż����ķ�չ���ر���ȫ��λϵͳ��GPS���ij��֣�Ϊ����ϵͳ�ṩ��ͳһ��ʱ�ӱ���ʹ��ѹ������ͬ��������Ϊ���ܡ��������ҴӾ�ʮ���֮��ʼ�ѵ�ѹ��������װ�ã�PMU��Ӧ���ڵ���ϵͳ�ļ�⡢�ȶ����ƺͱ��������ۼ�Ӧ���о������С����ڵ�һЩ��λ��ѧ��Ҳ��չ��PMU���о�������������ȡ����һЩ�ɹ������������˻���GPSͳһʱ�ӵĵ�ѹ����ͬ��������ʵ�ּ�����̽���˱�������ʵ�ͬ�����������㷨����DSPоƬΪ���ģ�ʵ���˻�����ɢFourier�㷨��GPSͬ����ѹ��Dz���װ�õ�Ӳ������ƣ�������ʵ���������
2��ͬ����ѹ��Dz����㷨�о�
2��1�����������
��������������DZȽ�ֱ�۵�һ��ͬ����Dz���������ֻ��Ҫ�����Ƶ�źŵĹ����ʱ����ijһʱ�����Ƚϼ��ɵó���DzĿǰ�г���GPS��OEM����ģ��������壨1PPS�������صľ�������ڡ�1��s֮�ڣ�����50Hz�Ĺ�Ƶ����λ����ڡ�0��018�㣬����������λ��Χ֮�ڡ�����ĿǰRTUͨ����������ʱȽϵͣ�����һ��������0��5��1��5s�����ֻҪ�������ѹ�����ʱ����1PPS��Ƚϣ����ܵõ������UTC����ʱ��ĸ��ڵ������ѹ��ǣ���ͼ1��a����ʾ������ϵͳ�е��������糧��������վ��Ϊ�ο�վ������վ������������ǺͲο���Ǽ��ɵõ�����վ����ڲο���ĽǶȣ��˽Ƕȿ�������վ�Ŀ��ƣ��緢����ĵ��١��л��ȵȡ�
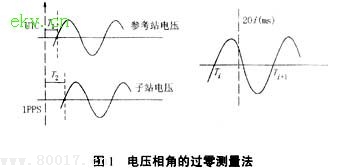
����ͼ1��a���У�����50Hz�Ĺ�Ƶ�źţ���վ����ڲο�վ�ĵ�ѹ��Dz�Ϊ��
![]()
������Ҫ�����Dz�����ʵʱ�ԣ���ÿһ���ܲ��ڶ��ܽ�����λ�Ƚϣ�����Ҫ��GPS��1PPSΪ������CPU���ɾ�ȷ����ʱ�ӽ�����50Hz���źţ���CPU�Ե�ѹ�Ĺ����ʱ�̴���ʱ���ǩ��������ڵ��ѹ����ڱ�50Hz����Dz��ͼ1��b����ʾ����k��������ʱ�����ѹ�Ĺ���ʱ�̷ֱ�ΪTi��Ti��1����ô��Tiʱ������ڱ�50Hz�źŹ���ʱ��20i ms�ĽǶ�Ϊ��
����Ҫ����ʵ����ǵ�ÿһ���ܲ���ʵʱ��أ��ͱ��������RTU��ͨ�����ʣ��ﵽÿ1�����ڴ���һ�����ݣ�����ʵ�ʹ����н���ʵʩ����һ�ֽ�������Dz���ר�õ�ͨ�����紫�����ʵʱ���ݣ������Ͽ��У������̴��۽ϰ���
�������������ԭ����Ӳ�������Ͻ���ʵ�֣����˷����ٶ�ϵͳƵ�����ȶ�����ģ���ʵ��ϵͳ�е�ѹƵ���Dz����ġ��������ڵ�ѹ������г��Ӱ��������·�IJ�һ����Ҳ����ɲ�����
2��2����ɢFourier�㷨
��Ƶ��ѹֵ�ɱ�ʾΪ��

���������50Hz�Ĺ�Ƶ����24�������������Ϊ15�㣬��7������8��ʽ��дΪ��
![]()

����XcҲ����ͬ���Ĵ�����������ȥ��ʽ��
�������ѹ������ʾΪ��
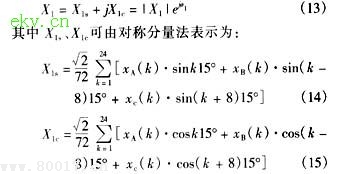
����xA��k����xB��k����xC��k���ֱ���A��B��C�����ѹ��һ���ܲ��ڵIJ���ֵ��k��1�IJ���ֵ��Ӧ��GPS��1PPS���������ء�
2��3���ݹ�Fourier�㷨
��������Ҫÿһ�������㶼��ʵʱ�ؼ������ѹ��ǣ��ɲ������µĵݹ�Fourier�㷨������ʽ��4����ʾ�����ҹ�Ƶ�źţ���ʵʱ�����еõ�������������


ʽ��20����Ϊ��ѹ����DFT�ݹ��㷨�ĵ������㹫ʽ��
�������ڴ���Ƶ�ĵ�ѹ�źţ������ݹ��㷨������������ڸ�ƽ������һ���̶�����������GPS�ṩ�ľ�ȷʱ�꣬���ܼ������ͬ����ͬһʱ�̵���Dz
3��������ʵ���Dz����㷨
������ʹ���ȶ�����ʱ������ϵͳ�е�Ƶ��Ҳ����С��Χ�ڲ����ģ����һ�㽻�������ж�����ͬ�������������Է�ֹDFT��������ʱ������й©��ͬ��������ָ��Ƶ����T���������TS���Լ���������N�ϸ�����T��NTS��Ŀǰ����ͬ����һ��ʵ�ַ����ǣ����Ȳ�����Ƶ����T��Ȼ������������TS��ȷ����ʱ���ļ���ֵ������ö�ʱ�жϷ�ʽʵ��ͬ��������
�������������ΪN�����ۼ���ó��IJ������Ϊtls���ɶ�ʱ�������IJ������Ϊ��
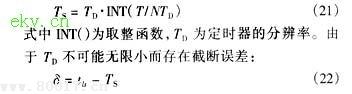
������Ȼ�Цģ�TD�������������Ϊһ�ܲ���ʵ���ܲ���ʱ���빤Ƶ����T֮����ڵ��������ʣ��У�
![]()
�����ڸ߾��ȵIJ������ϣ�Nͨ��ȡ�ýϴ���96�������������ʱ��ͬ���������ۻ��ﵽһ���Ƚϴ����ֵ���Ӷ�Ӱ������ľ��ȡ�
������ʽ��23�����Կ�������Сͬ����������һ��ֱ�۵ķ����Ǽ�СTD�����ø����ܵ�CPU����TMS320F206�����侧��Ƶ�ʿɴ�40M���ڲ���ʱ���ķֱ���TDΪ25ns���ڴֲ������ϣ������������ɵIJ���������������ľ��ȷ�Χ֮�ڡ�
������Сͬ������������һ�ַ�������һ�������ڲ��ñ�������ʣ���˫���ʲ������
����M��INT����T��TD����24���ɵã�
��T�䣽��T��MTD��TD��25��
��������T��TDΪ����ȷ�ΪM�ݼӵ�N���������е�ǰM������ǰM����IJ������ΪTS��TD����N��M��IJ������ΪTS������������Ϊ��T�䣬ԶС��ǰ�浥�������ʵ�ʱ����T���÷�����һ�����ڲ������ּ������������С������ʵ�ʲ���ʱ��С�ڹ�Ƶ����T����ɵ���
�������⣬����Ҳ�ɲ������µı�������ʷ�������Сͬ��������ʽ��21���е�ȡ���������趨ʱ������ֵP��INT��T��NTD�����ص���С������Ϊƫ��ˣ���Ȼ�ڲ��������У����Ų�����i����������ƫ������ͬ��������ij̶�Ҳ���ϼӾ硣���Ҫ��С������T��������������������ƫ��˵��ۻ�ЧӦ���ھ���IJ��������У��������´�����
�������ڴ�����һ��ԪW��ƫ��˽����ۼӣ��״β���ʱ��W��0�����W��W���ˣ���W��1����˴β����Ķ�ʱ������ֵȡΪP����W��1�������ֵȡΪP��1��W���¹��㡣��һ����Ƶ�������ظ��������̣���ʹƫ��˲������ۻ�����֤��һ����Ƶ�����ڵ�������T��TD
����������ȫ�������DZ�MRO��http://www.80017.cn/ �ṩ��
ע:�����ĵ��Բ�����ֱ������,���Ҽ�����������ֻ�'�������'ͼ��,Ȼ��ѡĿ������Ϊ,�������ر���
(������Դ��ȫ�������DZ�MRO��)
- ��һƪ�����DZ��������£� ������·���ߵ���Ƽ���װ
- ��һƪ�����DZ��������£� ���ߵ���ѡ�õ�һ��ԭ��
 | ʹ��Ԫ�ط����ǹ��������Ԫ�� | 6��7�� |
| ��һ����ɫ��������ɫ����ȫԪ | 6��7�� |
| ʵ����ѡ����ѧ����������ע�� | 6��7�� |
| �������Ϸ���������ά������ | 6��7�� |
| ҽ�ú��������ǻ���ԭ�� | 6��6�� |
| ��������֪ʶ�ʴ� | 6��1�� |
| 4������˵��ʪ�ȴ������ĺû� | 5��30�� |
| �������Ļ���ЧӦ | 5��29�� |
| ���ѡ��ѹ�������� | 5��29�� |
| ����������Ӧ��������ǰ�絲 | 5��26�� |

 | ���µĺ��ӱ� | 5��20�� |
| Ʒ �� �� �� ֪ �R | 5��20�� |
| ���ñ���β������ | 5��2�� |
| ���ʵ�������������֮��� | 4��20�� |
| ���¾�Ե�������ȷ���� | 4��28�� |
| ����ճ�ȵ�λ����� | 5��20�� |
| AWG��mm���� | 4��6�� |
| ��ο��ٿ�����·ͼ | 5��20�� |
| ��������ֲڶ�������ԽС���� | 4��20�� |
| ����װ���еĵ�����·��ƺͰ� | 5��20�� |


 �����
�����